Science
Robotic Hand Detaches, Crawls, and Grabs Objects with Precision
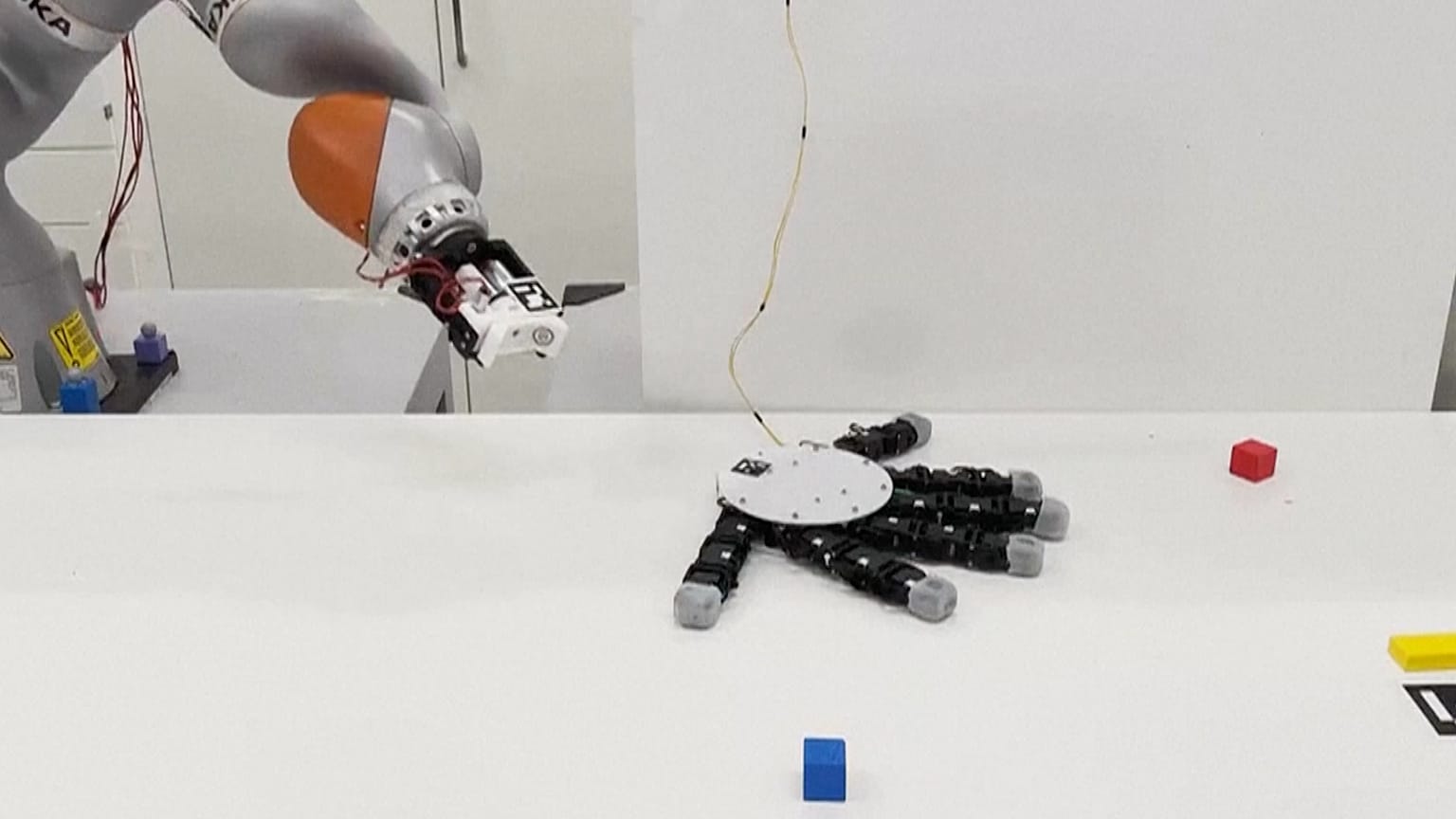
A groundbreaking robotic hand capable of detaching from its arm, crawling, and retrieving objects has been developed by researchers. Detailed in a study published in Nature Communications, this innovative technology allows the hand to mimic certain insect-like movements, enabling it to collect multiple items in sequence before reattaching itself.
The research team, led by Kunpeng Yao, an assistant professor at the University of Leeds in the UK, designed the robotic hand to overcome limitations inherent in traditional robotic hands, which typically imitate human anatomy. Yao explained, “We think the human hand is not perfect… We have a lack of symmetry in the hand, and the hand can only perform a limited number of tasks due to the structure.”
The robotic hand can replicate over 30 common human grasp types and is capable of lifting objects weighing up to two kilograms. This versatility was achieved by innovating beyond the conventional design, challenging the notion that human-like structures are optimal for all tasks.
Innovative Design and Functionality
The research team developed two versions of the hand, one featuring five fingers and another with six. Both designs boast a symmetrical structure, allowing for grasping from either side of the palm. This feature addresses a significant limitation of human hands, which rely on a single thumb and can grasp objects only from one side. Co-author Professor Aude Billard from EPFL in Switzerland posed an intriguing question: “Why having only one thumb? What if we had two or more, or any of the fingers could be a thumb?” This flexibility opens up new possibilities for more efficient gripping.
During testing, the robotic hand demonstrated its ability to detach, crawl like a small multi-legged robot, and retrieve up to three objects in succession. Remarkably, it maintained a secure grip throughout these movements.
Future Applications and Implications
The researchers envision potential applications for this technology in challenging environments, such as rescue operations or industrial settings where access is limited. Xiao Gao, a co-author based at the School of Robotics at Wuhan University in China, highlighted a practical scenario: “There are always some confined spaces inside of the factory where sometimes you need the hand that can detach and go inside of somewhere, maybe some industrial pipeline.” This adaptability could significantly enhance operational efficiency in various fields.
As the team continues to explore the practical applications of this innovative robotic hand, the implications for industries ranging from manufacturing to emergency response are substantial. The ability to maneuver in tight spaces and perform complex tasks could revolutionize how robotics are integrated into everyday operations.
This pioneering work not only showcases advancements in robotic technology but also prompts a reevaluation of how we design machines to interact with the world around us. The research represents a significant step forward in creating more dexterous and capable robotic systems.

Moyes Faces Referee Controversy Ahead of Everton vs Chelsea Clash

Man Hospitalised After Assault Outside Shop in Sandwell

Fred MacAulay and Ally McCoist Reunite for Special World Cup Show

NoOnes Targets $1 Trillion Gift Card Market to Enhance Crypto Access

Beloved Actor Matt Clark Passes Away at 89, Fans Mourn Loss

Discover How Milk Thistle Supplements Enhance Liver Health

Irish Community Care Celebrates 60 Years of Support in Liverpool

New Affordable Housing Development Planned for Crawley Site

Millions of Parking Tickets Issued Amid Calls for Reform

Claire Tomlinson Bids Farewell to Sky Sports After 27 Years

Iconic 90s TV Show House Hits Market for £1.1 Million

Tributes Flow for Kerry Gentle, Beloved RNLI Volunteer and Artist
Nathan Cleary’s Family Celebrates Engagement Amid Romance Rumors

Milk Bank Urges Mothers to Donate for Premature Babies’ Health

Shoppers Flock to Discounted Neck Pillow on Amazon for Travel Comfort

Alessia Russo Signs Long-Term Deal with Arsenal Ahead of WSL Season

Nuneaton Town FC Advances Plans for New Stadium in Stockingford

Museums Body Critiques EHRC Proposals on Gender Facilities
-
 Lifestyle6 months ago
Lifestyle6 months agoClaire Tomlinson Bids Farewell to Sky Sports After 27 Years
-
 Entertainment9 months ago
Entertainment9 months agoIconic 90s TV Show House Hits Market for £1.1 Million
-
 Lifestyle6 months ago
Lifestyle6 months agoTributes Flow for Kerry Gentle, Beloved RNLI Volunteer and Artist
-

 Sports11 months ago
Sports11 months agoNathan Cleary’s Family Celebrates Engagement Amid Romance Rumors
-
 Lifestyle11 months ago
Lifestyle11 months agoMilk Bank Urges Mothers to Donate for Premature Babies’ Health
-
 Lifestyle11 months ago
Lifestyle11 months agoShoppers Flock to Discounted Neck Pillow on Amazon for Travel Comfort
-
 Sports10 months ago
Sports10 months agoAlessia Russo Signs Long-Term Deal with Arsenal Ahead of WSL Season
-
 Sports8 months ago
Sports8 months agoNuneaton Town FC Advances Plans for New Stadium in Stockingford
-
 Politics11 months ago
Politics11 months agoMuseums Body Critiques EHRC Proposals on Gender Facilities
-

 Lifestyle11 months ago
Lifestyle11 months agoExploring England’s Cathedrals: A Journey Through History and Architecture
-

 Business11 months ago
Business11 months agoTrump Visits Europe: Business, Politics, or Leisure?
-

 Lifestyle11 months ago
Lifestyle11 months agoJapanese Teen Sorato Shimizu Breaks U18 100m Record in 10 Seconds